Bewegung einzelner Achsen steuern
Sehen Sie hierzu das Beispielprojekt PLCopenSingle.project im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples.
Dieses Beispiel zeigt, wie Sie einen Antrieb mittels der nach PLCopen standardisierten Funktionsbausteine steuern können.
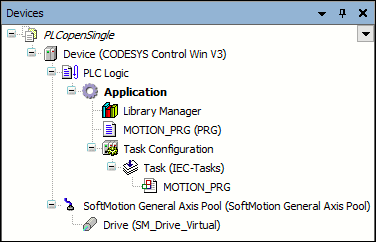
Fügen Sie im Gerätebaum unter SoftMotion General Axis Pool einen virtuellen Antrieb mit dem _Namen
Driveein.Erstellen Sie ein Programm MOTION_PRG in der Sprache ST.
PROGRAM MOTION_PRG VAR iStatus: INT; Power: MC_Power; MoveAbsolute: MC_MoveAbsolute; p:REAL:=100; END_VAR CASE iStatus OF // initialization of the axis 0: Power(Enable:=TRUE, bRegulatorOn:=TRUE, bDriveStart:=TRUE, Axis:=Drive); IF Power.Status THEN iStatus := iStatus + 1; END_IF // Move the axis to position p by use of the MC_MoveAbsolute function block 1: MoveAbsolute(Execute:=TRUE, Position:= p, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := iStatus + 1; END_IF // Move the axis back to position 0 by use of the MC_MoveAbsolute function block: 2: MoveAbsolute(Execute:=TRUE, Position:= 0, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := 1; END_IFFügen Sie den Aufruf des Programms MOTION_PRG zur Task MainTask hinzu.
Gerätebaum:
Laden Sie das Projekt auf die Steuerung und starten Sie es.
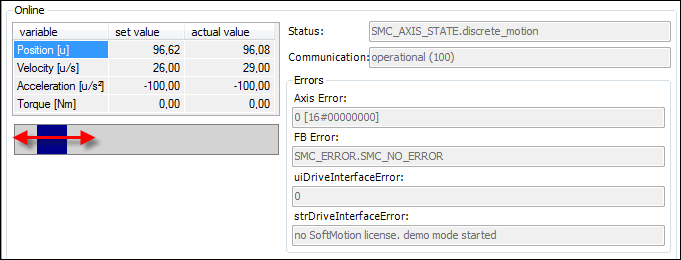
Öffnen Sie die virtuelle Achse Drive im Editor.
In der Sektion Online der Registerkarte Allgemein sehen Sie die Bewegung der Achse.